



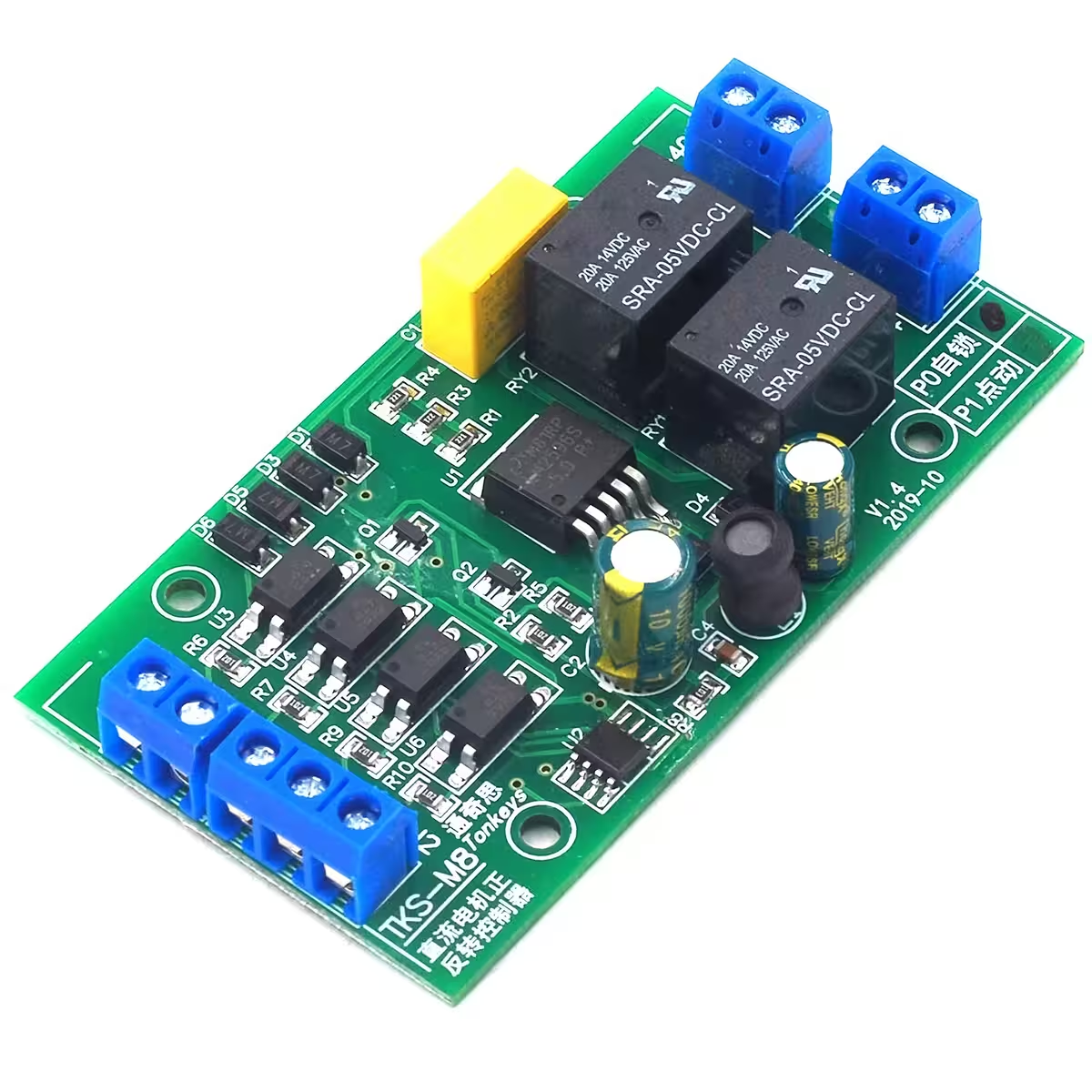
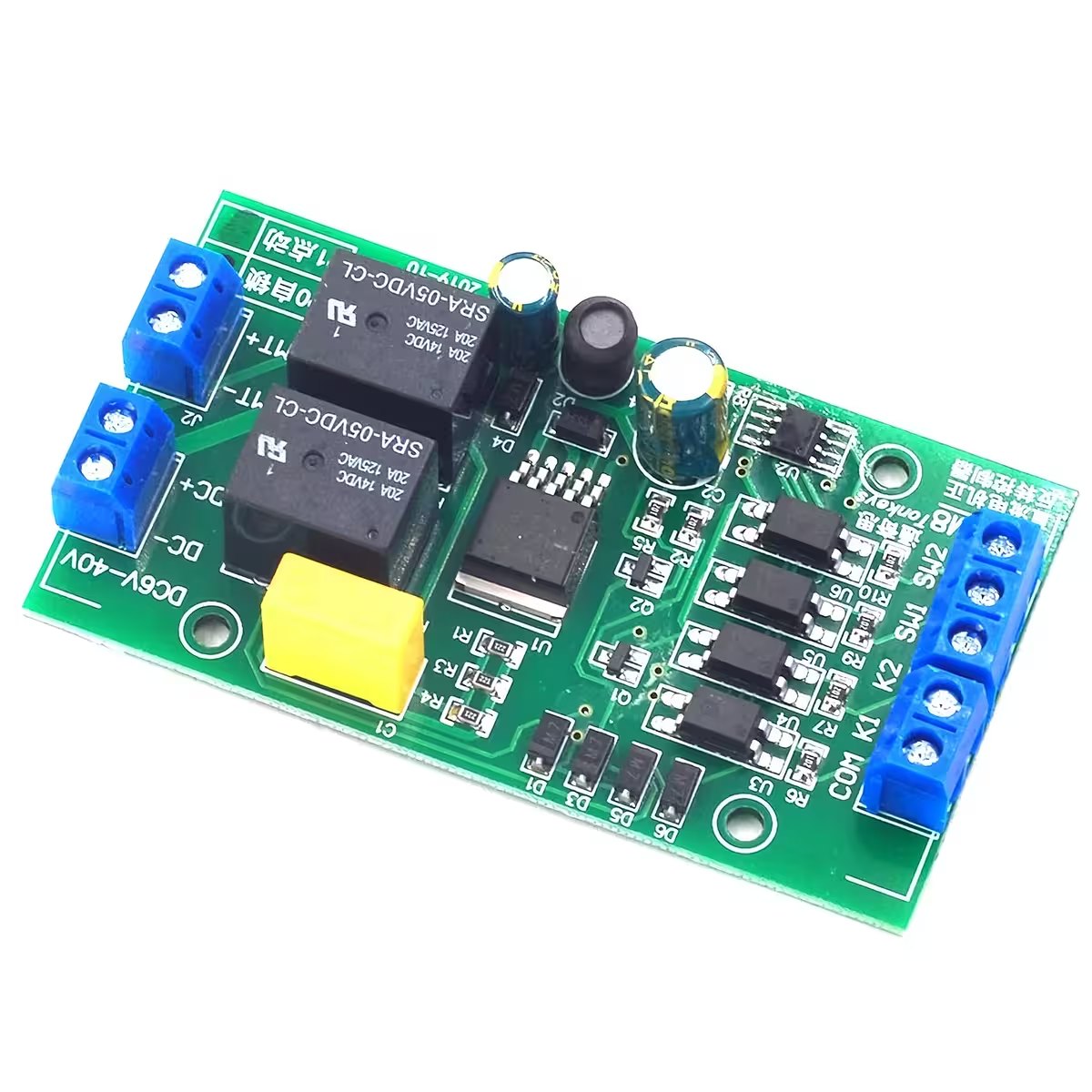
Kontroler smjera DC motora – precizna kontrola kretanja naprijed/natrag bez dodatnih komponenti
Radite na linearnom aktuatoru, reverzibilnom mehanizmu ili DIY projektu koji zahtijeva preciznu kontrolu smjera? Bez namjenskog modula, brzo ćete se naći u problemima s relejima, tranzistorima i kompliciranim ožičenjem. Ovaj DC kontroler smjera motora rješava sve u jednom kompaktnom modulu: spojite napajanje, motor i tipkala — i sustav je spreman za rad u nekoliko minuta.
Napomena: Motor prima isti napon kao i izvor napajanja. Napon se ne može regulirati putem ovog kontrolera.
Zašto odabrati ovaj model? (Ključne prednosti):
- Širok raspon napona: 4–40V DC — radi s LiPo baterijama, laboratorijskim izvorima ili industrijskim napajanjima bez potrebe za preinakama
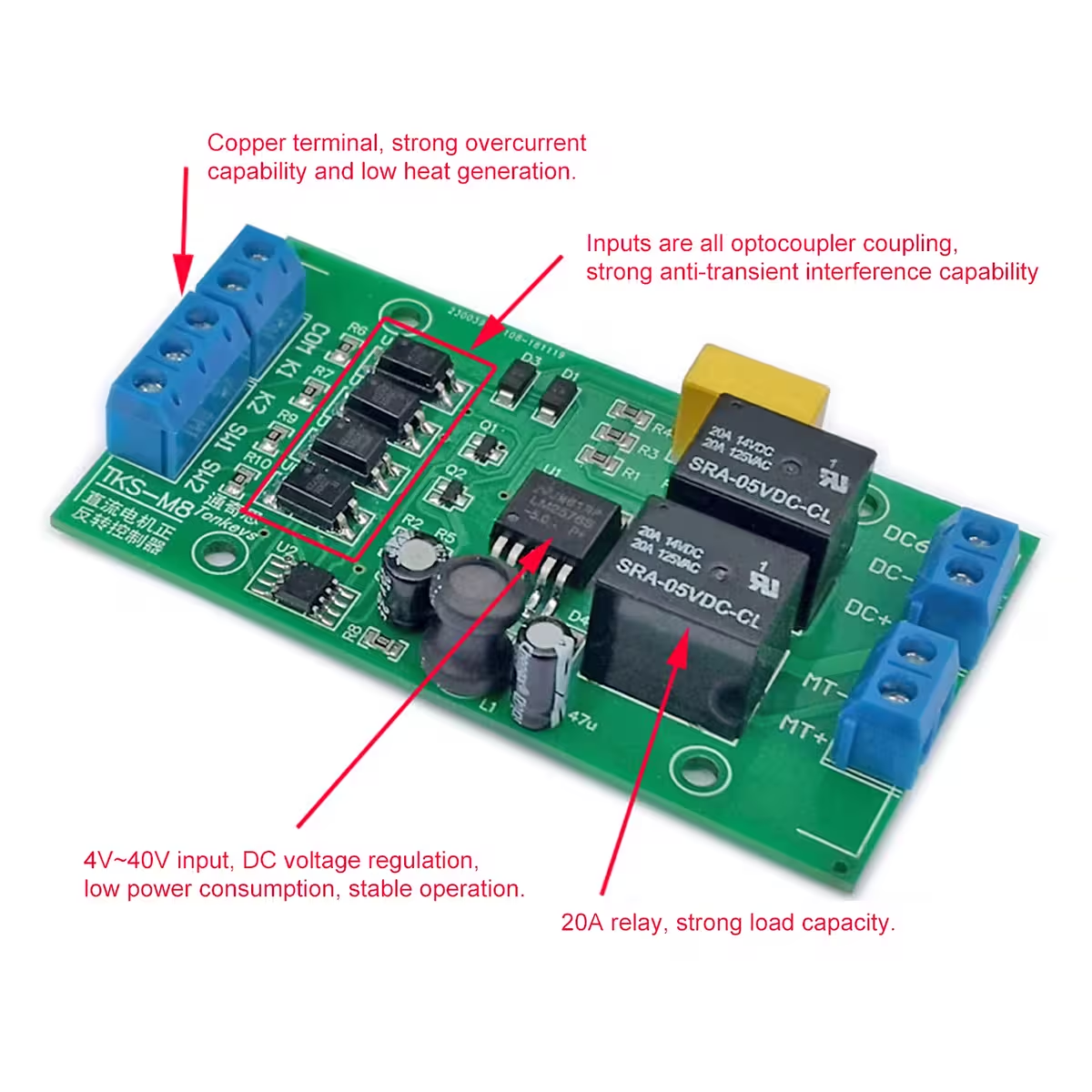
- Izlazna struja do 20A — podržava motore s visokim startnim strujama, pogodno za opterećenja do cca 80W
- Dva načina rada: PO i P1 — birajte između samoodržavanja (pokretanje kratkim impulsom) i jog moda (aktivan samo dok držite tipku), ovisno o primjeni
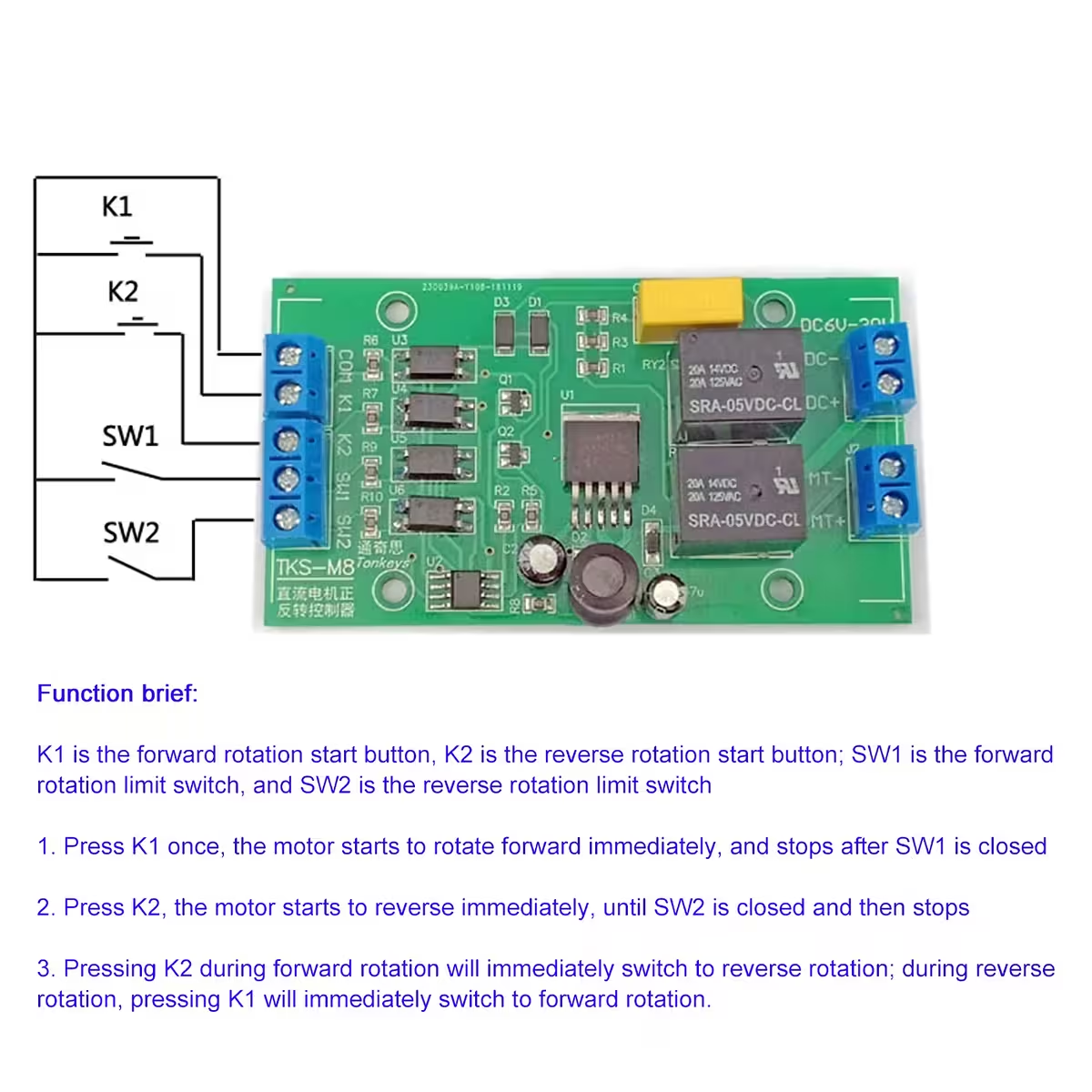
- Univerzalni active-low ulazi — izravno spajanje običnih tipkala, mehaničkih NO graničnih prekidača ili 3-žičnih NPN senzora, bez dodatnih otpornika ili logike
- Integrirani granični prekidači SW1/SW2 — automatsko zaustavljanje na kraju hoda, čime se eliminira rizik od mehaničkog zaglavljivanja ili preopterećenja
- Vijek trajanja >150.000 ciklusa — visoka pouzdanost za svakodnevne repetitivne primjene
- Niska potrošnja: 0,6W aktivno / 0,1W standby — ne troši bateriju dok sustav čeka na naredbu
Detalji i performanse
Kontroler koristi arhitekturu temeljenu na active-low ulazima: ulaz se aktivira kada napon na njemu padne ispod 2V. To znači da se obična tipkala, NO (normalno otvoreni) mehanički prekidači i NPN-NO 3-žični senzori spajaju izravno, bez posrednih komponenti.
Vrijeme odziva iznosi ≈20ms za K1/K2 naredbe i ≈50ms za SW1/SW2 granične prekidače — dovoljno brzo za dinamične aplikacije, a dovoljno stabilno da se izbjegnu lažna aktiviranja.
Kod viših napona, preporučena struja se smanjuje: na 12V možete koristiti do 20A, dok se na 24V preporučuje ograničenje na ~10A za siguran dugoročni termalni rad. Uvijek koristite odgovarajuće dimenzioniran osigurač i kabele prikladne za opterećenje.
| Parametar | Vrijednost / Detalj |
|---|---|
| Radni napon | DC 4–40V (preporučeno 6–36V) |
| Maksimalna izlazna struja | do 20A (pri 12V) |
| Preporučena snaga motora | do ~80W |
| Potrošnja modula (aktivno) | cca 0,6W |
| Potrošnja modula (standby) | cca 0,1W |
| Tip ulaznog signala | Active-low (aktivno pri naponu < 2V) |
| Vrijeme odziva K1/K2 | ≈ 20ms |
| Vrijeme odziva SW1/SW2 | ≈ 50ms |
| Načini rada | PO (samoodržavanje) / P1 (jog) |
| Vijek trajanja | >150.000 ciklusa |
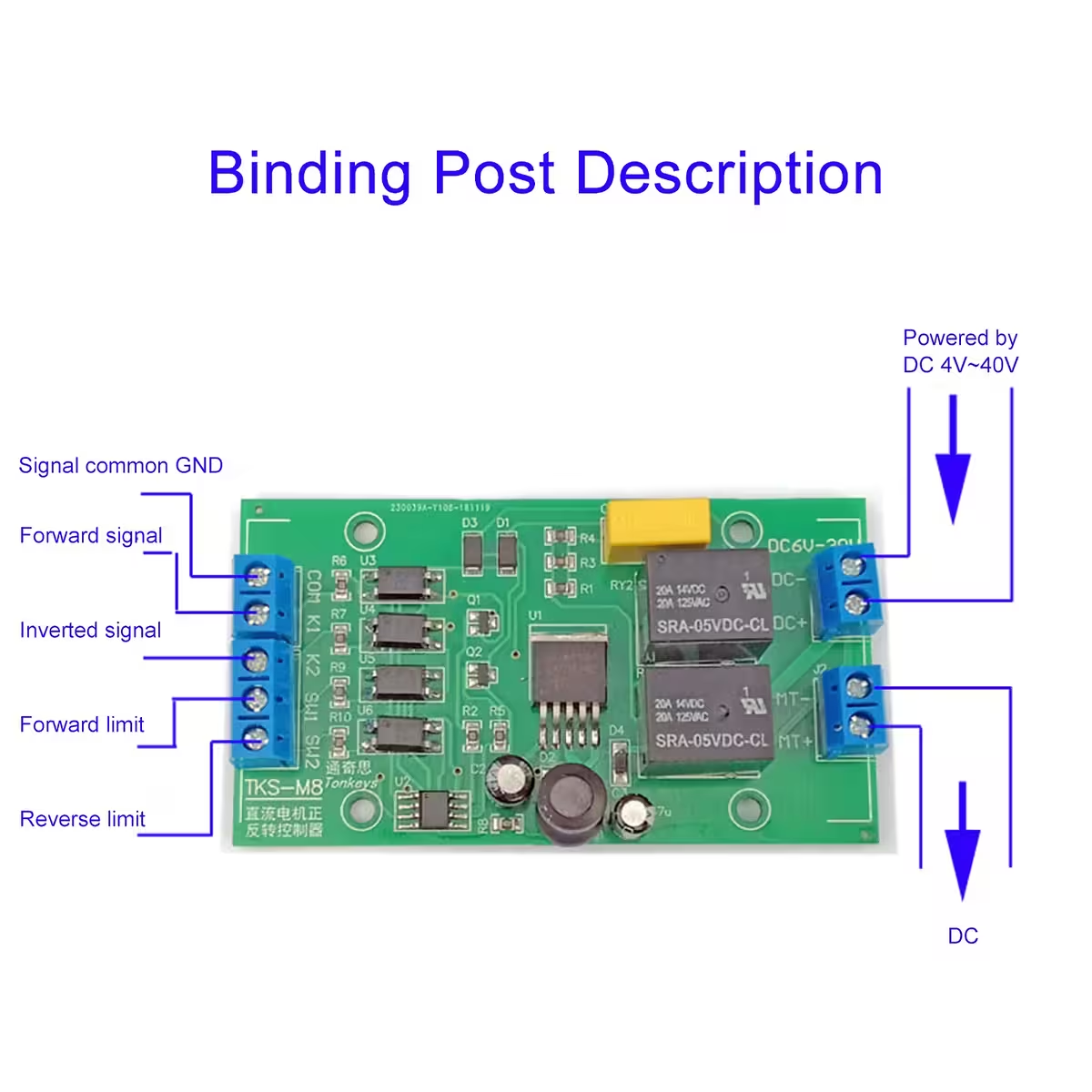
| Ulaz K1 | Naredba za smjer naprijed (active-low) |
| Ulaz K2 | Naredba za smjer natrag (active-low) |
| SW1 | Granični prekidač naprijed (preporučeno NO) |
| SW2 | Granični prekidač natrag (preporučeno NO) |
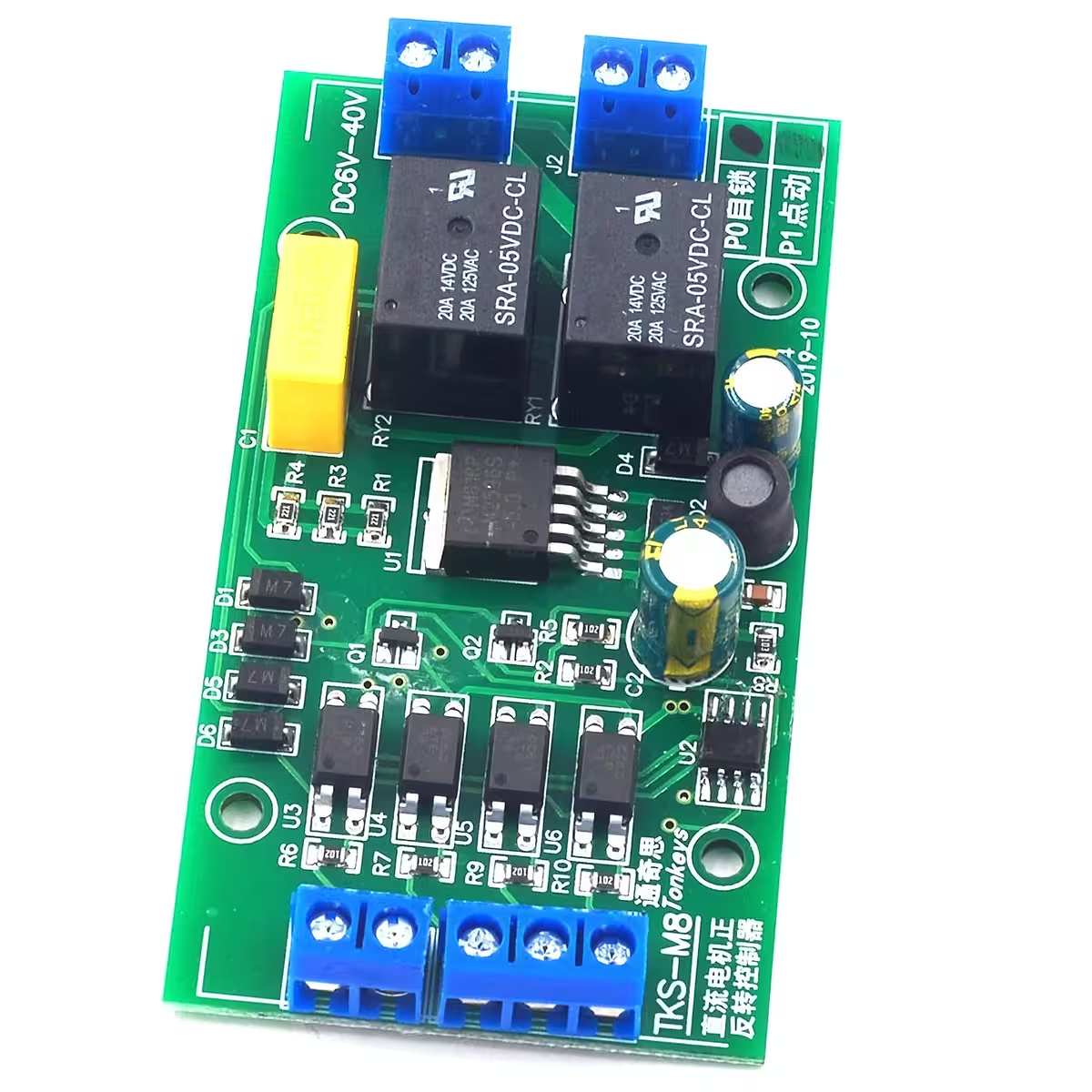
| VIN+ / VIN- | Napajanje modula DC 4–40V |
| Motor+ / Motor- | Izlaz za DC motor |
Upute za programiranje i korištenje
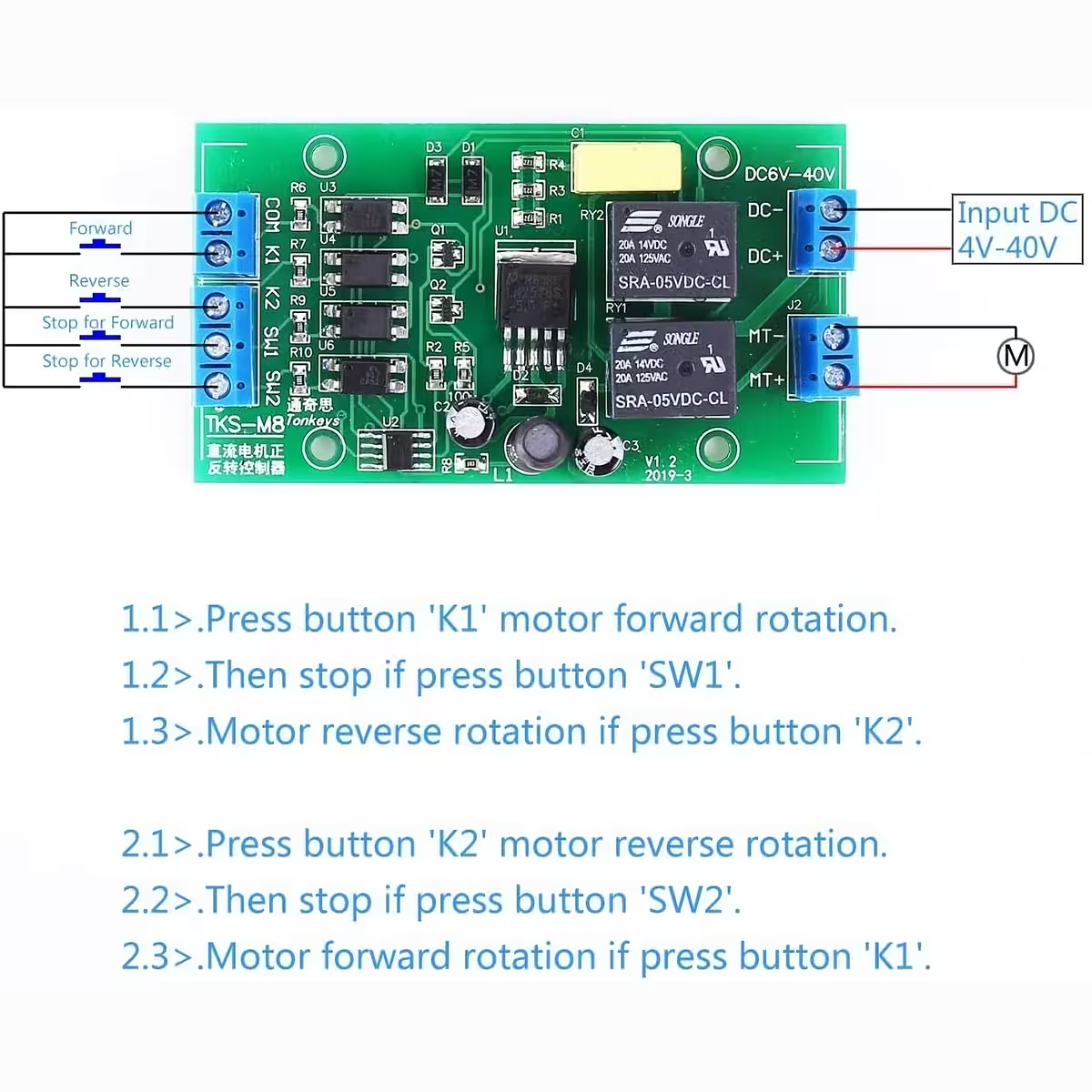
PO mod (Samoodržavanje): Kratki impuls na K1 ili K2 pokreće motor. Motor nastavlja raditi samostalno sve do aktivacije odgovarajućeg graničnog prekidača ili primitka suprotne naredbe. Idealno za automatizaciju.
P1 mod (Jog): Motor je aktivan samo dok je naredba K1 ili K2 aktivirana. Idealno za fino podešavanje i ručno pozicioniranje.
- Spojite izvor napajanja na VIN+ i VIN– (pazite na polaritet).
- Spojite DC motor na Motor+ i Motor–.
- Odaberite način rada: PO za samoodržavanje ili P1 za jog.
- Spojite tipkala ili upravljačke signale na K1 (naprijed) i K2 (natrag) — active-low ulazi.
- Po želji spojite mehaničke granične prekidače ili NPN-NO senzore na SW1 i SW2.
- Za automatsko cikličko kretanje A→B→A: spojite izlaze NO prekidača s pozicije A na K1 i s pozicije B na K2, ostavljajući SW1/SW2 nepovezane.
- Za Arduino integraciju: spojite GND Arduina na GND kontrolera, digitalni pin za naprijed na K1 i digitalni pin za natrag na K2. Postavite pinove kao OUTPUT i pošaljite LOW signal za aktivaciju.
- Provjerite startnu struju motora i osigurajte osigurač odgovarajuće vrijednosti na liniji napajanja.
Sadržaj pakiranja
- 1 × Kontroler smjera DC motora (Forward / Reverse), PO/P1 modovi
Često postavljana pitanja
Što znači active-low i zašto je važno?
Ulaz se aktivira kada napon na njemu padne ispod 2V — odnosno kada je spojen na masu (GND). Obična tipkala, NO mehanički prekidači i NPN senzori rade upravo tako. Nisu potrebni dodatni otpornici ili inverzna logika.
Koja je razlika između PO i P1 moda?
U PO modu, kratki impuls na K1 ili K2 pokreće motor koji radi autonomno do graničnog prekidača ili suprotne naredbe — korisno za automatizaciju. U P1 modu, motor radi samo dok držite naredbu aktivnom — korisno za precizno pozicioniranje ili ručnu kontrolu.
Mogu li spojiti ovaj kontroler izravno na Arduino?
Da. Spojite GND Arduina na GND kontrolera i koristite dva digitalna pina postavljena kao OUTPUT. Kada je pin u stanju LOW, naredba je aktivna. Arduino upravlja logikom, a kontroler snagom — bez dodatnih komponenti.
Mogu li koristiti granične prekidače s normalno zatvorenim (NC) kontaktom?
Kontroler je optimiziran za NO (normalno otvorene) prekidače. NC kontakti invertiraju logiku i mogu uzrokovati neželjeno ponašanje. Uvijek koristite NO kontakte za SW1 i SW2.
Je li potreban hladnjak pri maksimalnoj struji?
Pri strujama blizu 20A ili u intenzivnim ciklusima, osigurajte adekvatnu ventilaciju i pratite temperaturu modula. Za kontinuirane primjene pod velikim opterećenjem, mali hladnjak ili prisilna ventilacija mogu značajno produžiti vijek trajanja.
Kako stvoriti automatsko cikličko kretanje bez timera?
Spojite NO prekidače s pozicije A na K1 i s pozicije B na K2, ostavljajući SW1 i SW2 nepovezane. Pri dosezanju svakog kraja hoda, prekidač automatski aktivira naredbu za suprotni smjer — motor će oscilirati kontinuirano bez vanjske intervencije.
Video prezentacija
Galerija fotografija












Recenzije
Još nema recenzija.